放错地方的易拉罐,也要让它和别的罐罐在一起:

他们在Alphabet公司的办公室测试后,发现这台机器人可以显著降低垃圾造成的污染,将本能回收利用却被送去垃圾填埋场的垃圾占比从20%降到不到5%。
怎么做到的
想让机器人学会垃圾分类,需要用到感知、移动和操作,借助计算机视觉技术进行感知以及帮助机器人前行的自动驾驶能力都是业界熟悉的,但如何学会在复杂环境中用“手”拉开柜子、打开抽屉、捡走垃圾则是必须要让机器自行学会的操作。
因此,AlphabetX用到了三个方法来让机器人学会灵活用“手”。
跟人类学习
第一种是跟人类学习,模仿人类的动作和做法。
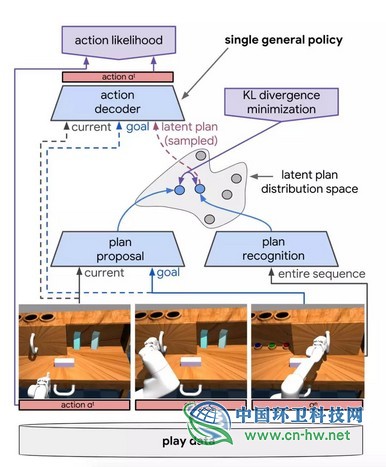
这里就用到了Play-LMP算法,它在没有特定数据集训练的情况下,让机器人跟人类的演示学习,最终实现平均成功率85.5%。
学出来的成绩,大概是这样的,左边是任务要求,右边是执行过程:
跟其他机器人学习





 2020全国厨余(餐厨)
2020全国厨余(餐厨) 2020全国厨余(餐厨)
2020全国厨余(餐厨) 2020全国厨余(餐厨)
2020全国厨余(餐厨) 2020全国厨余(餐厨)
2020全国厨余(餐厨)
 环卫科技网公众号
环卫科技网公众号 环卫微学院公众号
环卫微学院公众号 乐分圈微信公众号
乐分圈微信公众号 厕重点微信公众号
厕重点微信公众号